dr. ing. Ciobanu Emil
În lucrare sunt prezentate o parte din cercetările experimentale și unele concluzii rezultate din acestea, referitoare la sistemul de comenzi al ampenajului orizontal al IAR 93, asistat de servomecanismul hidraulic BU-51-MS, sistem în care apăreau oscilații întreținute în timpul acționarii în condiții normale de lucru la sol. Comisia Tehnica de analiză a accidentului în urma căruia s-a pierdut avionul IAR 93 dublă comandă cu nr. 001 a stabilit apariția flutter-ului. Încercările s-au desfășurat în urma accidentului. După descrierea principială a modului de lucru a sistemului studiat, a dispunerii punctelor de măsură pentru înregistrare, se trece la prezentarea cercetărilor experimentale efectuate pentru a constata influența diverșilor factori care condiționează stabiltatea sistemului mecano-hidraulic studiat. În final este prezentată soluția aleasă pentru înlăturarea autooscilațiilor, aplicata la avioanele IAR 93 preserie. Cu servomecanismul modificat au fost efectuate și încercări în zbor la CIZ, dar care nu sunt prezentate în lucrare. Lucrarea de fată a fost prezentata în 1979 la un simpozion la Academia Tehnica Militara. Am operat câteva completări și reformulări.
Față de cele constatate , rezultă următoarele:
1. Accidentul s-a produs datorită faptului că zborul nr.15, executat de avionul IAR-93 dublă comandă nr.01 pe data de 24 noiembrie 1977, s-a desfășurat în zona limitei inferioare a vitezei critice de flutter (viteza indicata critică de flutter are limita inferioară egala cu 1050 Km/ora, potrivit raportului de flutter transmis de partener).
2. Deznituirea eclisei de pe cadrele nr.42 și nr.43 a permis deplasarea relativă a acestor cadre între ele și a provocat deplasări nepermise ale îmbinării grinzilor de suport ale amplificatorului hidraulic fată de cadrul nr.42, deplasări care au generat la amplificatorul hidraulic comenzi necontrolate asupra ampenajului orizontal.
3. Aceste comenzi necontrolate au introdus avionul într-o evoluție cu urcări și coborâri succesive, bruște, asociate cu variații mari ale factorului de sarcina, maxime indicate de accelerometrul din cabina, marcate la valori cuprinse intre –5g și +10g.
Încercările prezentate în continuare în lucrare s-au efectuat în 1977-1978 pe avionul IAR 93 DC nr. 002 la sol. Acesta prezenta în timpul lucrului în condiții normale de alimentare cu lichid sub presiune la 210 bar și a acționarii de la manșă a lanțului de comenzi un puternic fenomen de vibrații ale celor două suprafețe de comandă (stabilizator), la acționarea brusca a manșei(impulsuri).
Mod de lucru și denumiri
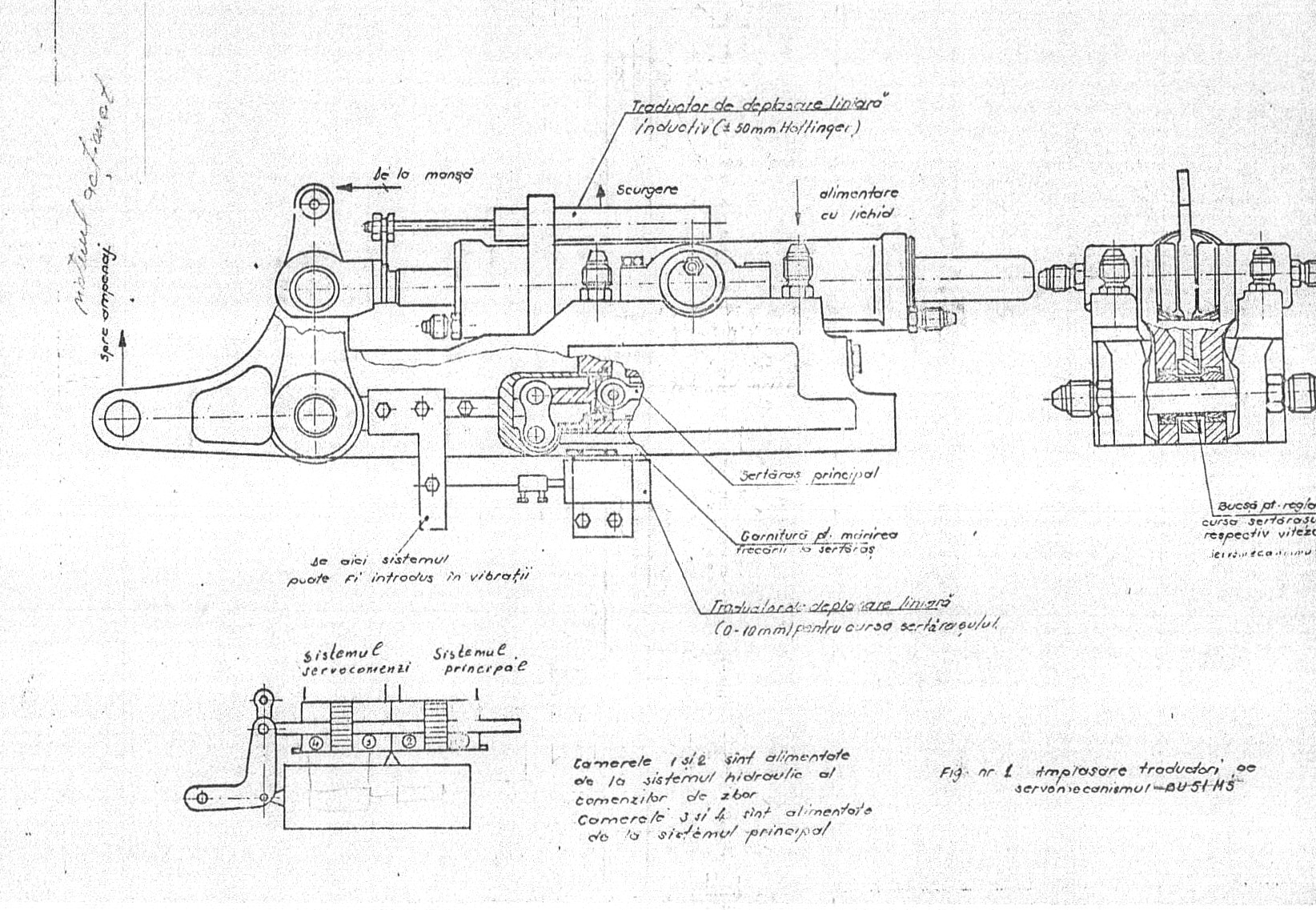
Alimentarea cu lichid sub presiune s-a făcut de la un utilaj de aerodrom care asigura presiunea de lucru intre 0 și 210 daN/cm2, care este presiunea de lucru nominală a sistemului. Servomecanismul utilizat BU-51-MS (fig. 1) pentru acționarea suprafețelor de comandă este cu dublu corp(este de pe MIG 21) , are doua motoare hidraulice dispuse în tandem, fiecare din acestea fiind alimentat de la un sistem hidraulic independent. Lanțul de comenzi de la manșă până la legătură cu urechea (fig. 2) care acționează sertărașul servomecanismul l-am denumit „lanț intrare” .Lanțul de comenzi dintre leagănul servomecanismului și axul de acționare a suprafeței de comanda(stabilizator) (fig. 3) îl numim „ lanț ieșire”.
Servomecanismul se fixa în partea de jos a fuzelajului posterior între motoare prin intermediul a 6 șuruburi care traversau corpul servomecanismului BU51MS. Corpul este executat din dural. În acesta se găsește sistemul de distribuție al lichidului(două distribuitoare, cu cămașă care în cazul blocării sertărașului principal prelua funcția de distribuție).
Modul de lucru, (fig. 1) comenzile se dau manual prin acționarea manșei de la începutul lanțului intrare, această mișcare s-a înregistrat uneori cu traductoare de deplasare unghiulara Ti situate pe axul de rotație din cabină. Mișcarea de comandă ajunge în punctul I care aparține cinematicii servomecanismului. Considerând pentru moment punctul M fix, punctul S se vă deplasa mai mult întrucât raportul lungimilor MS/IM este 1,5.
De punctul S sunt legate doua sertărașe care comandă lichidul pentru cele două motoare dispuse în tandem respectiv camerele p1 ; p2 la primul cilindru și p3 ;p4 la al doilea. Lichidul este astfel dirijat încât tija de execuție, prin deplasarea punctului M urmărește deplasarea punctului I și totodată readuce pe neutru sertărașele (punctul S) la încetarea comenzii. Semnalul de intrare amplificat de mii de ori (1,5 daN la intrare, 5600 daN la ieșire) ca forță se transmite prin pârghii și leviere la organul acționat, suprafață de comanda, care este simbolizata prin masa să inerțială MI.
2. Instalația de măsură și înregistrare
În scopul determinării cauzelor producerii acestor AUTOOSCILAȚII au fost efectuate numeroase experimentări și măsurători.
Pentru măsurătorile în regim dinamic a fost folosita o instalație electronică de măsură și înregistrare Honeywell, care a avut în compunere și elemente executate în I.M.F.C.A.-INCREST, special pentru aceste experimentări.
Traductorii de deplasare au fost utilizați pentru măsurarea:
-deplasării unghiulare la axul manșei
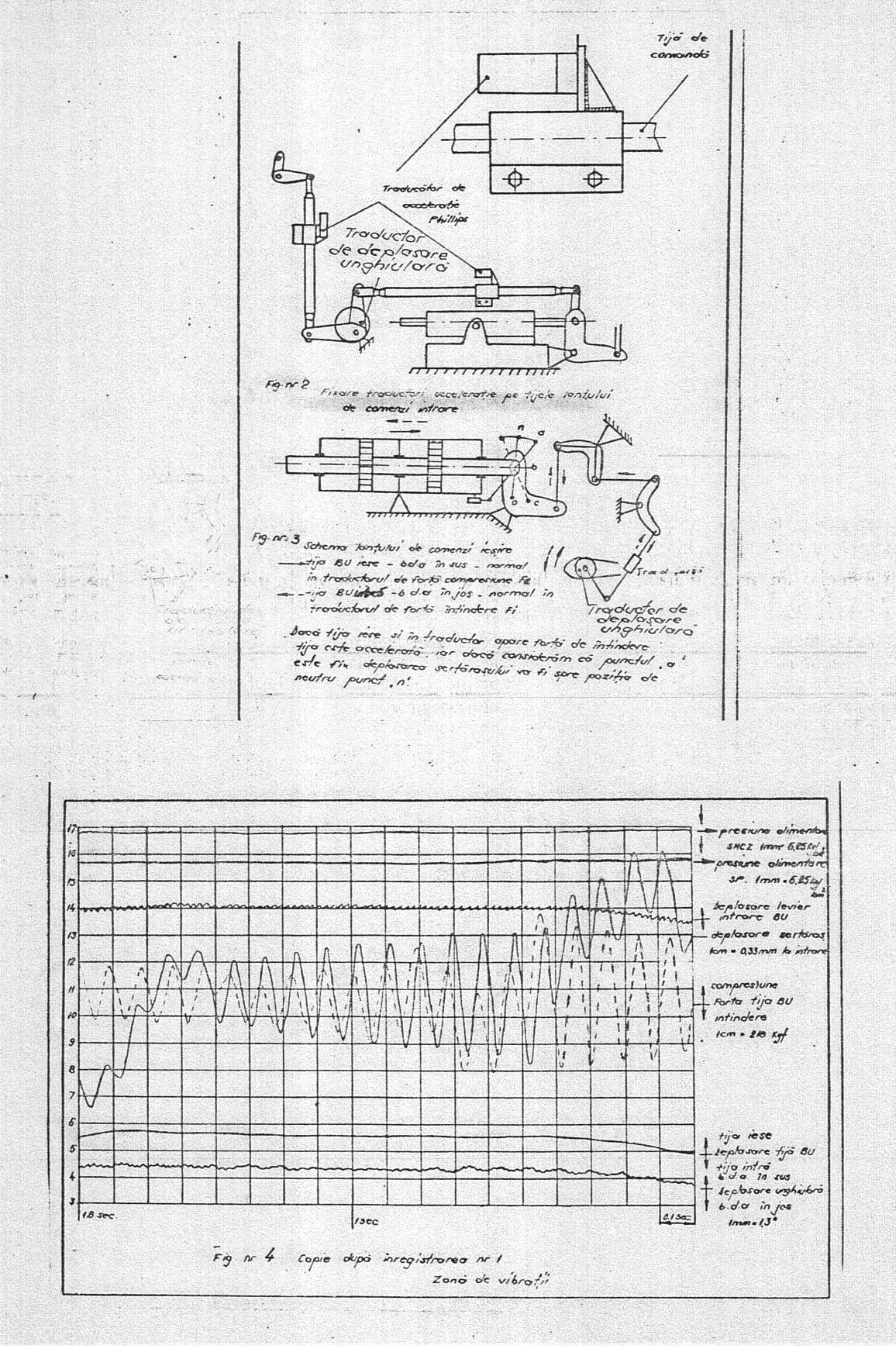
-deplasarea unghiulara a levierului tijei de la intrarea în servomecanism (fig. 2)
-deplasarea tijei de execuție a servomecanismului (fig. 1) fata de corpul motorului
-cursei sertărașului fata de corpul servomecanismului (fig. 1)
-deplasarea unghiulara a axului stabilizatorului (fig. 3)
-deplasării liniare intre cadre.
Pentru înregistrarea presiunilor au fost amplasați traductori:
-pe conductele de alimentare cu lichid sub presiune
-pe conductele de scurgere spre rezervor
-în camerele de lucru ale servomecanismului (în acest scop a fost utilizat un servomecanism modificat).
Am utilizat un singur traductor de forță amplasat în locul ultimului levier din lanțul de comenzi ieșire (fig. 3).
Traductorii de accelerației au fost fixați
-pe lanțul de comezi ieșire, pe traductorul de forță
-pe suprafață de comanda.
Variația parametrilor măsurați cu ajutorul traductorilor enumerați anterior a fost înregistrată pe o hârtie sensibila la ultraviolete având lățimea de 203 mm.
Pe înregistrări este marcat timpul prin perioadele de 0.0.1 sec. sau 0.1 sec., de asemenea un caroiaj care permite determinarea valorii absolute a mărimii măsurate.
Determinarea frecventelor proprii ale lanțurilor de comenzi intrare, ieșire, ale suprafețelor de comanda, au fost determinate cu instalații speciale- Prodera
3.Prezentarea fenomenului
În fig. 4(din păcate alte înregistrări nu am mai găsit) avem porțiuni copiate după înregistrările făcute.Fig. 4 cuprinde o zonă cu oscilații în care sertărasul servomecanismului trece de la o poziție de maxim deschis corespunzătoare unui sens de deplasare, la poziția maxim deschis corespunzătoare deplasării tijei de execuție cu viteză maximă în sens opus. Această deplasare a sertărașului ar trebui să fie în mod normal formată din segmente de linii drepte, dar din diagrama obținută se vede că fenomenul de vibrații influențează și deplasarea sertărașului. În momentul trecerii prin zona de neutru, sertărașul are o mișcare sinusoidală care ca amplitudine depășește zona de insensibilitate(0,4mm) comandând astfel servomecanismului care devine sursa de energie pentru întreținerea fenomenului. Se observa că forță din tija de acționare a suprafeței de comandă are o variație sinusoidală de valori foarte mari, ajungând uneori până la 40% din forță maxima de 5600 daN, a servomecanismului. Din înregistrări constatam că presiunile pe conductele de intrare și ieșire nu sunt influențate de apariția fenomenului de vibrații.
Deplasarea lanțului de intrare nu prezintă variații sinusoidale, intrarea servomecanismului urmărind cu o defazare în timp deplasarea manșei.
Porțiunea de înregistrare care cuprindea o „scoatere din oscilație, se observă o atenuare a fenomenului după un număr destul de mare de cicluri ceea ce dovedește o elasticitate mare a sistemului. Pe prima porțiune a înregistrării – în care sertărașul este deplasat spre zona de insensibilitate, se observa mici oscilații pe spotul deplasării tijei de execuție a servomecanismului și a axului suprafeței de comandă.
La funcționarea normală a sistemului deplasările sertărașului sunt urmărite de deplasările tijei de execuție a servomecanismului respectiv de suprafața de comandă. Presiunile prezinta mici variații, normale datorită consumului de lichid a servomecanismului.
4.Experimentări efectuate
Un sistem hidraulic de urmărire este stabil dacă, fiind scos din poziția de echilibru de o acțiune perturbatoare oarecare, el revine într-un timp scurt la starea precedentă, lucru care deseori nu se produce la sistemul studiat, îndeosebi, după o serie de inversări rapide a sensului de deplasare a tijei de execuție a servomecanismului. Stabilitatea sistemelor hidraulice de urmărire reale depinde de mulți factori care nu pot fi luați în considerare la analiza teoretică astfel încât rezolvarea pe cale matematică a problemei stabilității acestor sisteme, este adeseori practic imposibilă sau foarte dificilă și de aceea a fost aleasă în principal calea experimentală. Rezultatele teoretice și experimentale privind sistemul studiat, au fost obiectul unor lucrări elaborate în Institut și au fost folosite că bază de plecare și îndrumar pe tot parcursul încercărilor. Plecând de la cauzele instabilității sistemelor hidraulice de urmărire prezentate în literatura și lucrările amintite, am studiat influenta acestor factori asupra sistemului nostru.
a) Coeficientul de debit și cel de presiune al distribuitorului, care în unele lucrări sunt numiți factori de amplificare a vitezei și respectiv al forței.
Acești coeficienți sunt definiți că raportul intre debit respectiv presiune la motor și cursa sertărașului.
Constatam că energia care o primește sistemul acționat este direct proporțională cu acești coeficienți. Deci cu cât acești coeficienți sunt mai mici sistemul este mai stabil.
Din înregistrările presiunilor în camerele servomecanismului rezulta că în primele 0.02-0.03 s după deschiderea sertărașului în camerele legate cu presiunea de lucru apare un șoc de presiune care ajunge la 160 bar, ,în timp ce în camerele legate cu conductele de joasă presiune valorile presiunii sunt foarte mici câțiva bari. În momentele următoare datorită droselizării lichidului în distribuitor, atât pe intrarea cât și pe ieșirea din camere, presiunile de pe cele două fețe ale pistonului devin aproape egale. Rezultă așadar că la inversări repetate ale sensului de deplasare a tijei de execuție a servomecanismului, sistemul primește o cantitate mare de energie care favorizează autooscilația sistemului.
Fenomenul de instabilitate a putut fi înlăturat prin reducerea presiunii de alimentare (a coeficintului de amplificare a presiunii) la 170 bari(daN/cm2) pe ambele sisteme, reducere care are că urmare scăderea corespunzătoare a forței maxime și vitezei servomecanismului și complicarea instalației hidraulice. Reducerea vitezei la 50% din valoarea maximă prin micșorarea cursei maxime a sertărașului, a avut că efect dispariția autooscilațiilor. Având în vedere dificultățile tehnologice de modificare a distribuitorului și schimbarea caracteristicilor servomecanismului, care afecta viteza de bracare a suprafeței de comanda, nu s-a acționat asupra coeficienților amintiți anterior.
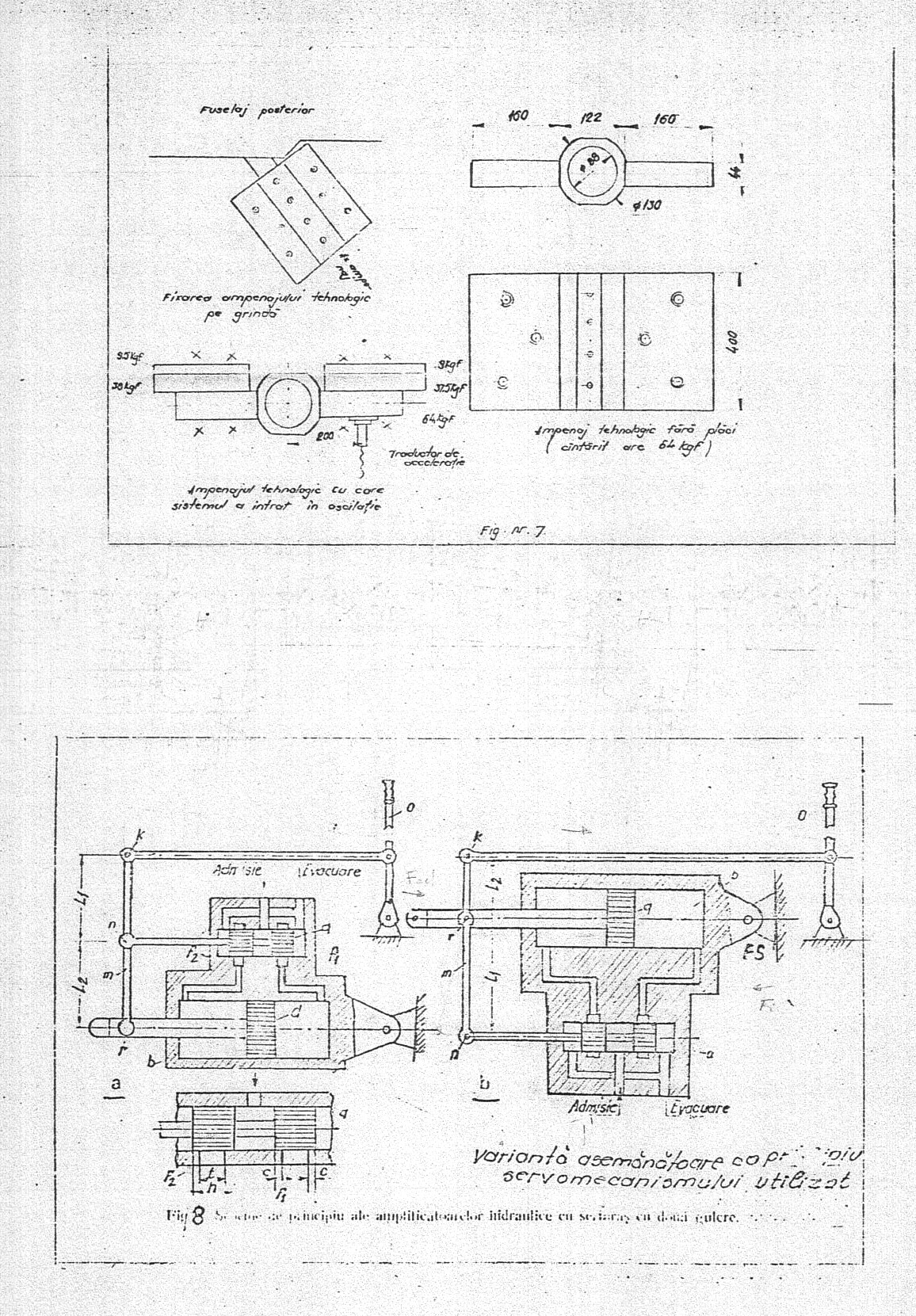
b) Masa organelor acționate de servomecanism se impune să fie cât mai redusa. Cu ajutorul unui dispozitiv (fig. 5) care simula o masă inerțială variabilă a stabilizatorului, plecând de la valori mici s-a constatat apariția autooscilațiilor la o valoare de 60% din momentul de inerție al suprafețelor de comandă reale. Important este că frecventa de producere a fenomenului este aceeași pentru diverse momente de inerție. Masa echivalenta a sistemului a fost determinată prin înregistrarea în același punct a forței și accelerației.
c) Un efect de amortizare al sistemelor hidraulice de urmărire îl constituie și scăpările de lichid din sertăraș și din cilindrul(motor) .Am reușit să înlăturam fenomenul de autooscilații prin existenta unor scăpări artificiale de lichid în cilindru, prin legături directe intre perechile de camere ale verinului servomecanismului, însă în condițiile unei reduceri cu 30% a forței maxime dezvoltate de servomecanism.
Această soluție este aplicată la servomecanismele unor firme de prestigiu, dar bineînțeles cu pierderi de lichid mai reduse.Dezavantajul poate fi și încălzirea lichidului.
d) Influenta lanțului de comenzi intrare a constituit obiectul multor încercări de ex.
-adăugarea unor mase
-modificarea rapoartelor de transmitere
– introducerea unor frecări
-introducerea unor elemente elastice
-modificarea simulatorilor de sarcina
-excitarea din diverse puncte, etc.
Nu s-a constatat nicio influentă, asupra producerii fenomenului de autooscilație.
e) Jocurile din lanțul de comenzi ieșire au fost determinate, depășeau cele admise de regulament, dar probabil au cumulat și unele elasticități ale fixării suportilor. Experimental nu s-a constatat vreo influenta a jocurilor din cele doua lanțuri de comenzi.
f) Compresibilitatea lichidului a fost determinată static prin aplicarea unei forte controlate și măsurarea deplasării tijei de execuție, valorile obținute sunt apropiate de cele indicate de furnizor pentru lichidul respectiv. În prezent se dispune și de impedanță servomecanismului.
În timpul autooscilațiilor presiunea măsurată în camere nu a scăzut sub 40 daN/cm2, neexistand astfel posibilitatea degajării gazelor din lichid, deci a unei scăderi esențiale a modulului de compresibilitate.
Se afirma că dacă nu ar fi elasticitatea sistemului și compresibilitatea lichidului, sistemul hidraulic de urmărire ar fi stabil.
g) Aplicând un moment la suprafață de comanda sub 1/3 max. (cu tija de execuție a servomecanismului blocată), am măsurat deplasări ale corpului servomecanismului față de structura înconjurătoare care puteau produce deschiderea sertărașului și reacția de deplasare a tijei servomecanismului.
Fig. 8b prezinta fixarea și cinematica uni servomecanism având același principiu de funcționare cu cel utilizat în sistemul cercetat. Astfel orice impuls care provoacă deplasarea corpului servomecanismului provoacă autooscilații ale sistemului. Acest lucru se datorește faptului că sub acțiunea unui asemenea impuls, punctul de fixare F.S. se deplasează datorita elasticității, că urmare pârghia legăturii de reacție k n , se vă roti în jurul punctului k care îl consideram fix, evident că pentru un anumit nivel de forte sertărașul (punctul n) se va deplasa cu o distantă suficientă pentru că lichidul să pătrundă în camera corespunzătoare a cilindrului de lucru și să puna tija de execuție în mișcare. Ca urmare a reacției sensului rotirii pârghiei kn se schimba, energia potențială acumulata în acest mod de sarcina elastică se transformă în energie cinetică, care face că sertărașul să depășească poziția de echilibru(neutru). Datorită cinematici legăturii de reacție orice deplasare a corpului servomecanismului este amplificată de 2,5 ori la sertăraș, ceea ce favorizează permanentizarea fenomenului de autooscilație, pe frecvența proprie a elementului de ieșire.
Servomecanismul din fig. 8a are o cinematică mult mai avantajoasă în ceea ce privește scăderea sensibilității la deplasare fata de structură.
Descrierea de mai sus a fost confirmată prin măsurători.
Din înregistrări au rezultat deplasări ale tijei de execuție și sertărașului corespunzătoare raportului pârghiilor cu punctul k fix (Fig 6). În toate cazurile frecvența de producere a fenomenului a fost pe frecvența proprie structurii aproximativ 10-11 Hz la IAR 93. La un MIG 21 care era echipat cu BU-51-MS , avion cu peste10 ani vechime, frecvențele măsurate au fost peste 13 Hz. De menționat că din determinările noastre BU-51-MS avea timp de răspuns de 0,05 secunde, foarte prompt, fiind destinat unui avion supersonic, performant. Oscilațiile apăreau după o serie de inversări rapide ale sensului de deplasare a tijei de execuție a servomecanismului, acestea constituiau impulsul de începere a oscilațiilor la o frecventa la care servomecanismul putea raspunde.
5.Concluzii (formulate în 1978)
Până la aplicarea unor modificări constructive importante că de ex.: rigidizarea structurii, reducerea maselor inerțiale, schimbarea servomecanismului, schimbarea cinematicii servomecanismului etc , soluții complexe și de durata, pentru atenuarea fenomenului a fost introdusă o garnitura de teflon pe un piston solidar cu sertărașul servomecanismului (unul pe fiecare sistem hidraulic). În pistonas a fost data o gaură de 1,1 mm care avea rolul de a droseliza lichidul la frecvente mari(de a frâna mișcarea sertărașului). Soluția a permis desfășurarea zborului în siguranță dar cu dezavantajele care decurg de aici: creșterea forței de acționare a sertărașuluim un mic histerezis. Efectul a fost și creșterea timpului de răspuns a servomecanismului( pentru a nu mai răspunde la frecventa structurii) dar care nu afecta performanțele IAR 93..
Materialul prezentat a înfățișat succint o parte din încercările efectuate timp de peste un an de un colectiv de lucrători( de la laboratorul de hidraulica din INCREST în colaborare cu IAv Craiova, IAv Bacau, CIZ Craiova) pentru determinarea cauzelor autooscilațiilor sistemului de acționare a ampenajului orizontal de la IAR 93 și a găsirii unei soluții într-un termen cât mai scurt de reluare a zborurilor și avansării programului IAR 93.
Nota august 2008
După echiparea avioanelor IAR 93 preserie cu servomecanismul modificat BU-51-MSR, au fost reluate zborurile întrerupte, peste un an de zile. La primul zbor efectuat la CIZ cu servomecanismul modificat a zburat alaturi de pilotul Col Coman și dl Director al centralei T Zanfirescu, pentru a da încredere în siguranță avionului IAR 93.
Avionul IAR 93 a fost prezentat în zbor la parada militara de la 23 August 1979, 3 avioane
La vremea respectivă au fost contactați specialiști de la diverse firme străine, care au confirmat posibilitatea apariției fenomenului, dar nu au dat soluții.
Avioanele de serie IAR 93 au fost echipate cu servomecanisme DOWTY, firma care a produs și servomecanismele pentru CONCORDE. Servomecanismele au fost „asimilate” în tara. Servovalvele de pe acest servomecanism că piese de schimb aveau costul greutății în aur. Pe IAR 93 au fost asimilate în tara 142 de echipamente hidraulice din cele 144 care echipau avionul.
Ciobanu Emil